学术中心
利用RP-YOLO技术检测无人收获水稻穗密度
发布时间:
2024-10-17
来源:
作者:
水稻穗密度是无人收割机自动调速的重要依据之一,密度检测对智能化升级至关重要。目前,现有的水稻穗密度检测方法不符合实际收获场景,难以满足实时性要求。为了解决这个问题,我们开发了一种用于无人收割机的实时水稻穗密度检测方法。该方法包括基于YOLOv5n (RP-YOLO)的穗粒检测模型和基于坐标变换的水稻穗粒密度计算。通过增强目标检测头、重新配置骨干网和下采样模块、引入注意机制、细化损失函数等技术对RP-YOLO进行了优化。在坐标转换的基础上,将检测帧顶点的世界坐标转换为图像坐标,计算出圆锥密度。建立了粳稻RP- 1668数据集,并对模型进行了训练和测试。与原来的YOLOv5n模型相比,改进后的模型每秒浮点运算次数(FLOPs)减少33.33%,模型大小减少31.90%,检测速度提高12.63%,准确率(AP0.5)提高3.82% (AP0.5:0.95, 6.96%)。RP-YOLO与传统的轻量化和非轻量化模型相比,具有更高的精度和检测速度。在田间应用中,与人工计数相比,密度检测的误差小于10%,结果清晰地反映了水稻穗密度的变化。对于1.4 m × 1.0 m稻田成像区域(分辨率为2560 × 1280),该方法在车载工业计算机上以15 fps的速度进行检测,为无人驾驶收割机的操作速度调整提供可靠的数据支持。
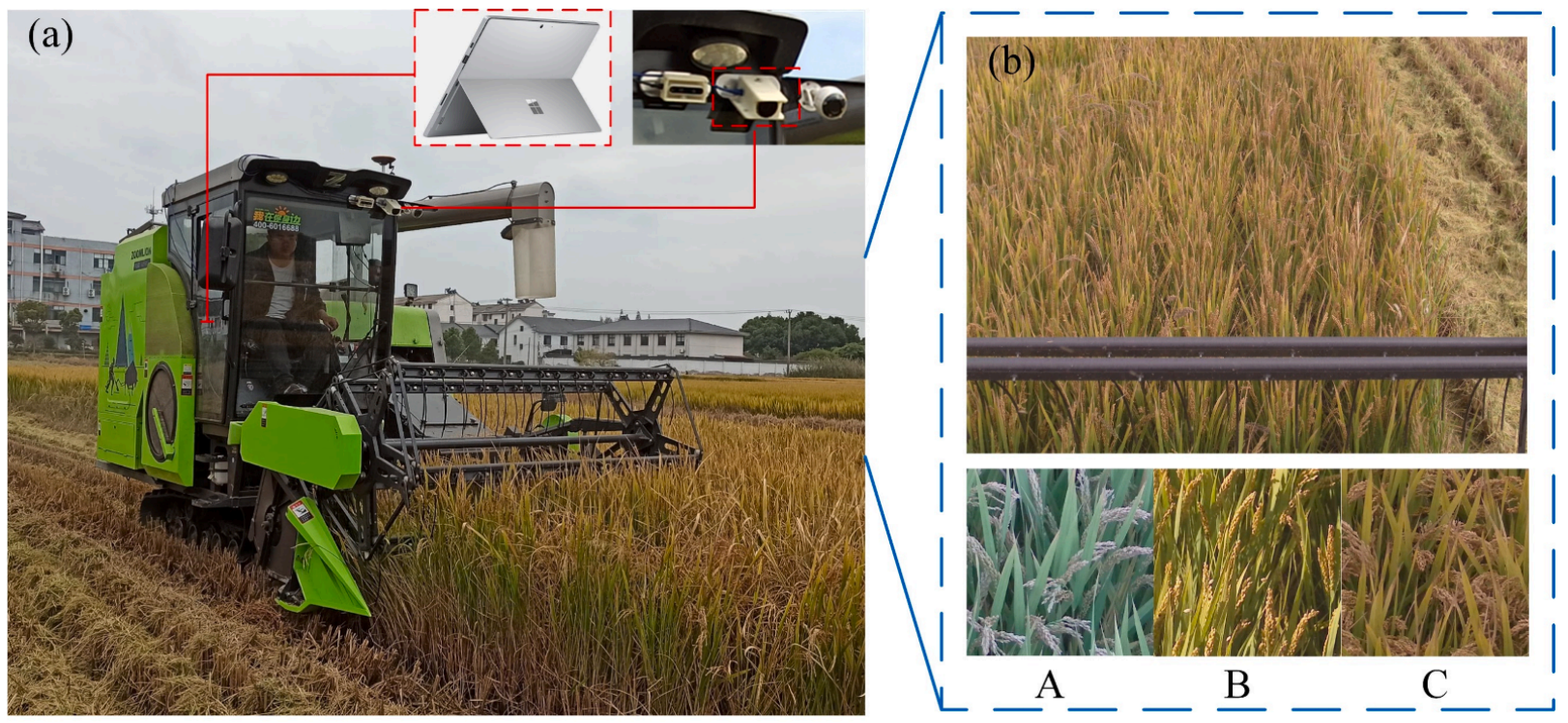 图1 样本和图像采集。(a)采集地点;(b)样本。
图1 样本和图像采集。(a)采集地点;(b)样本。
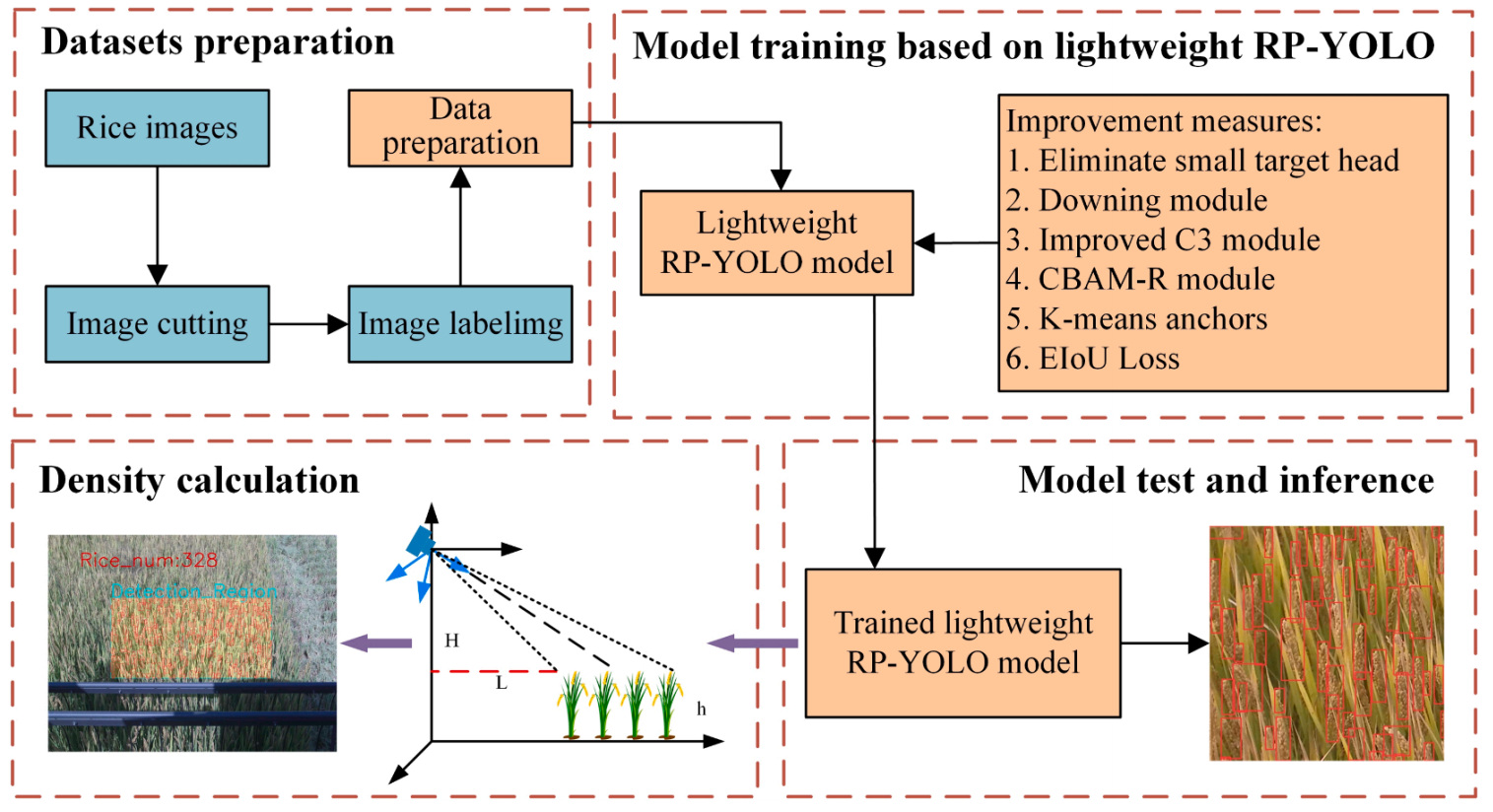 图2 水稻穗密度检测方法。
图2 水稻穗密度检测方法。
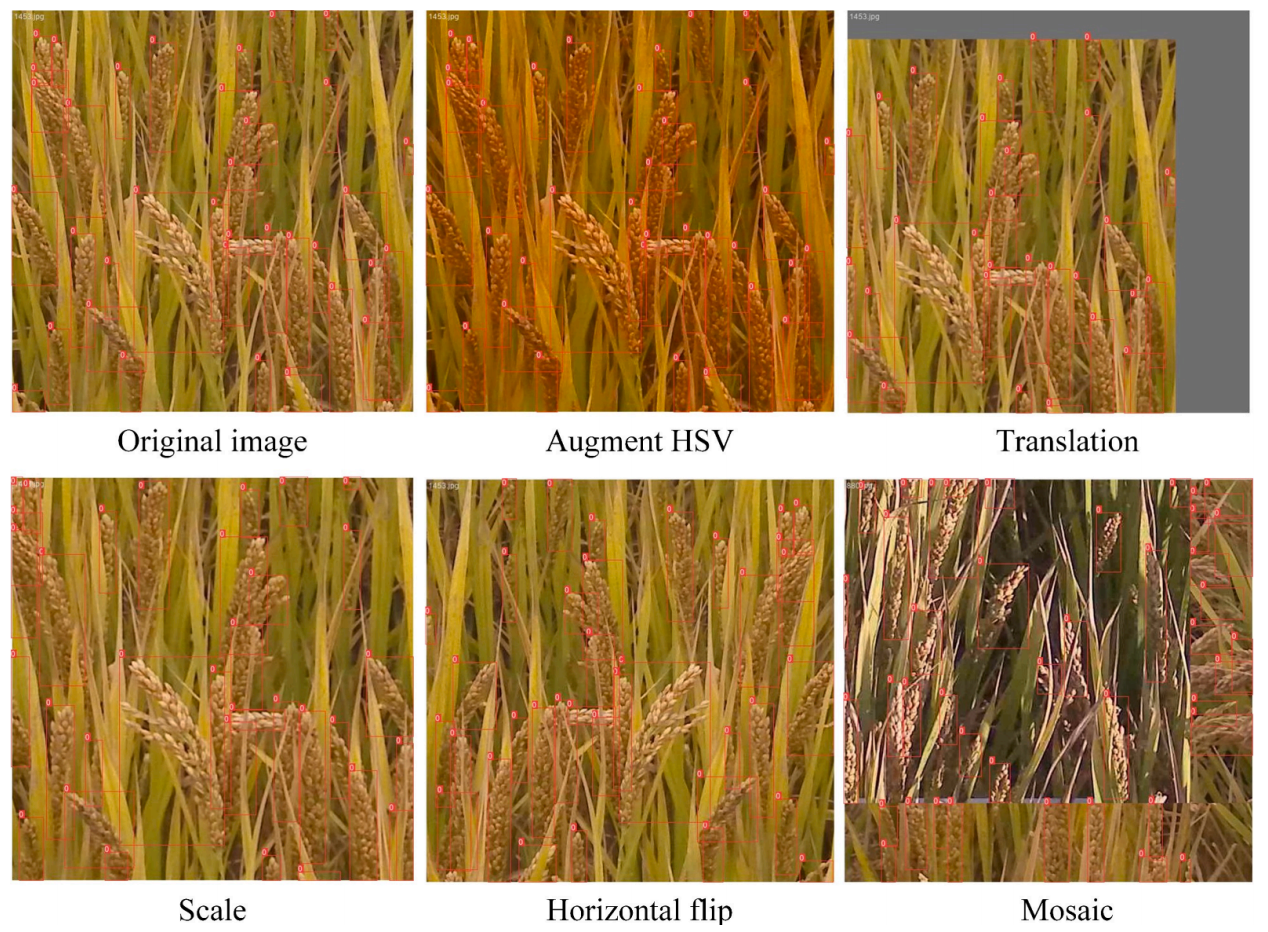 图3 数据增强的示例。
图3 数据增强的示例。
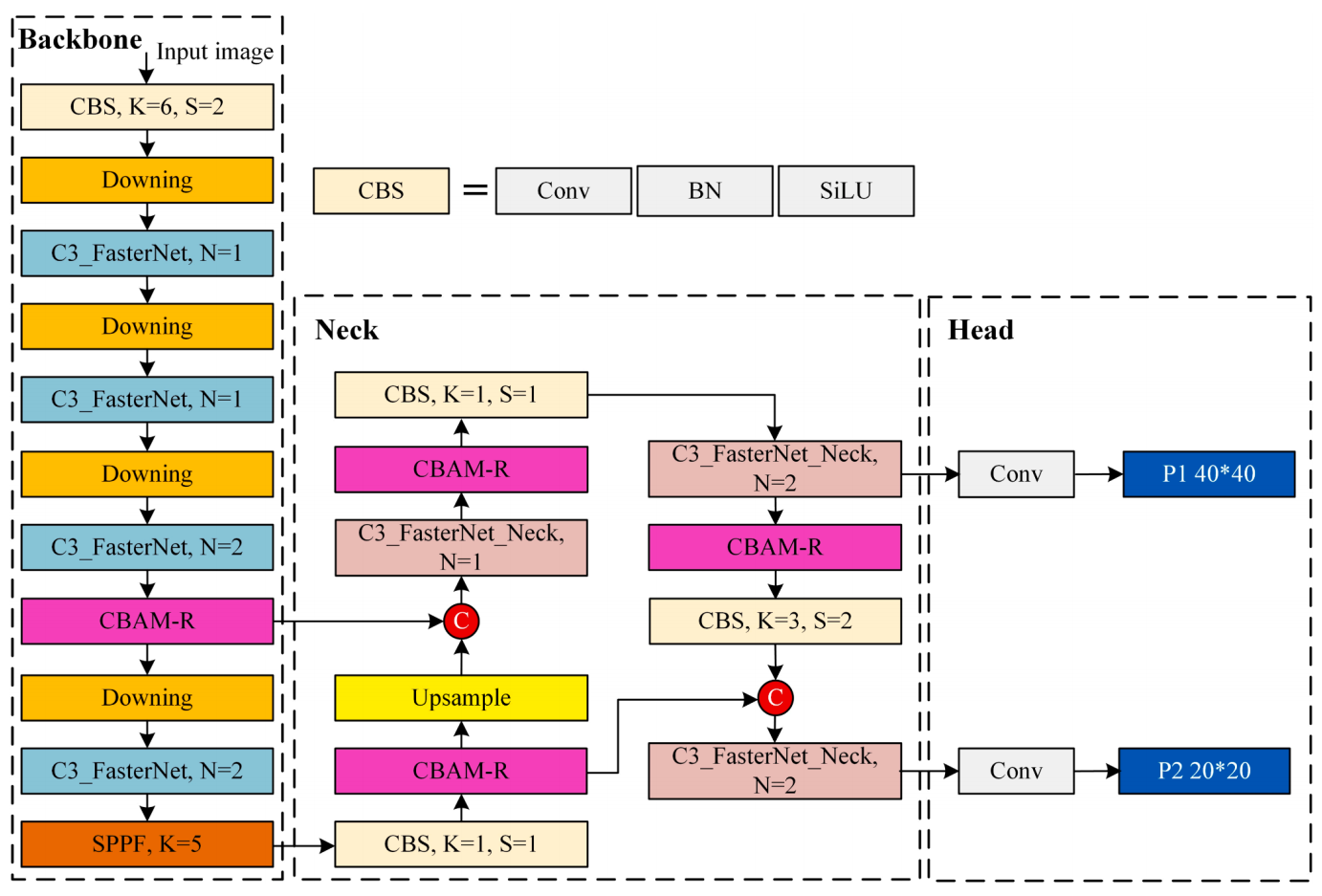 图4 RP-YOLO的网络结构。
图4 RP-YOLO的网络结构。
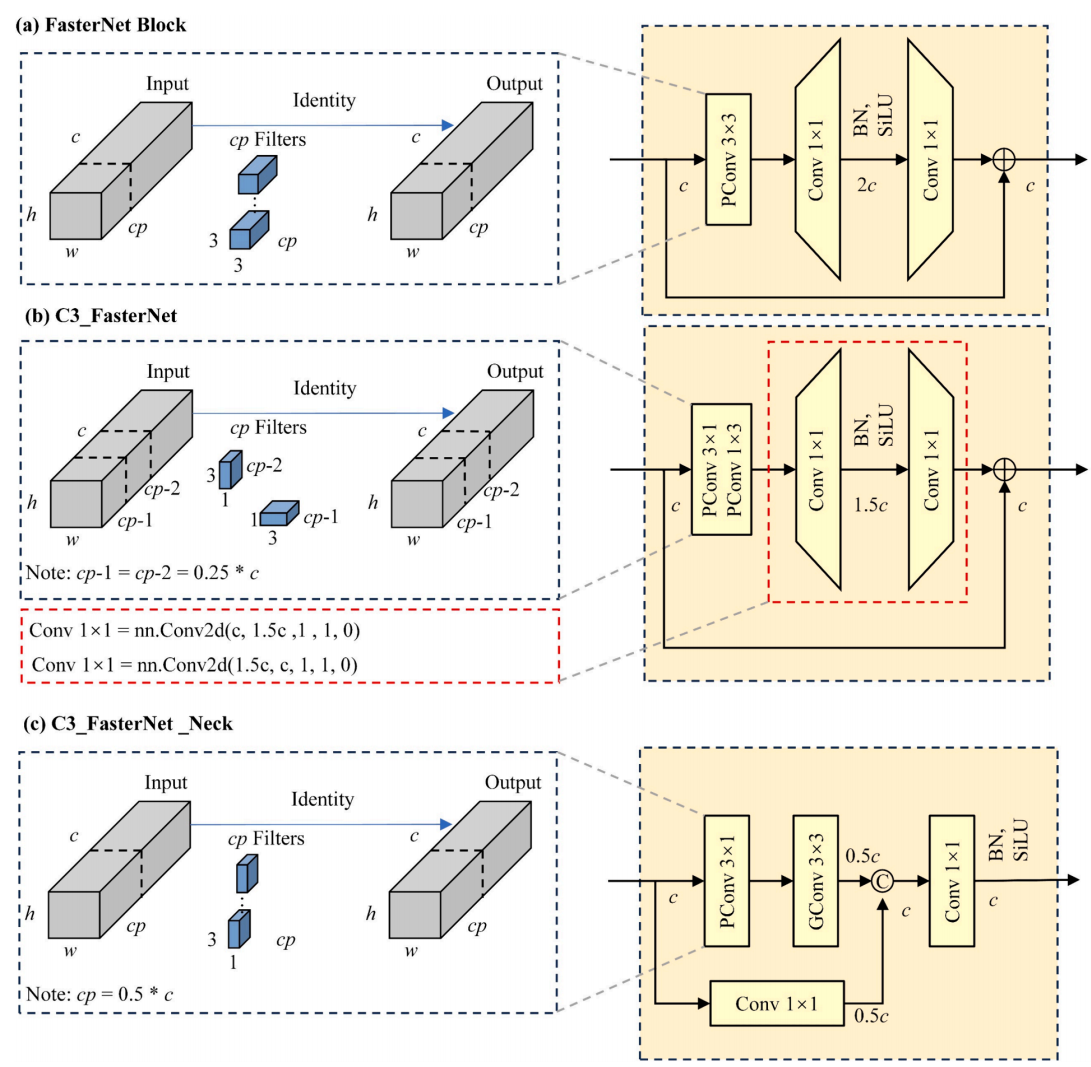 图5 改进的C3模块结构。
图5 改进的C3模块结构。
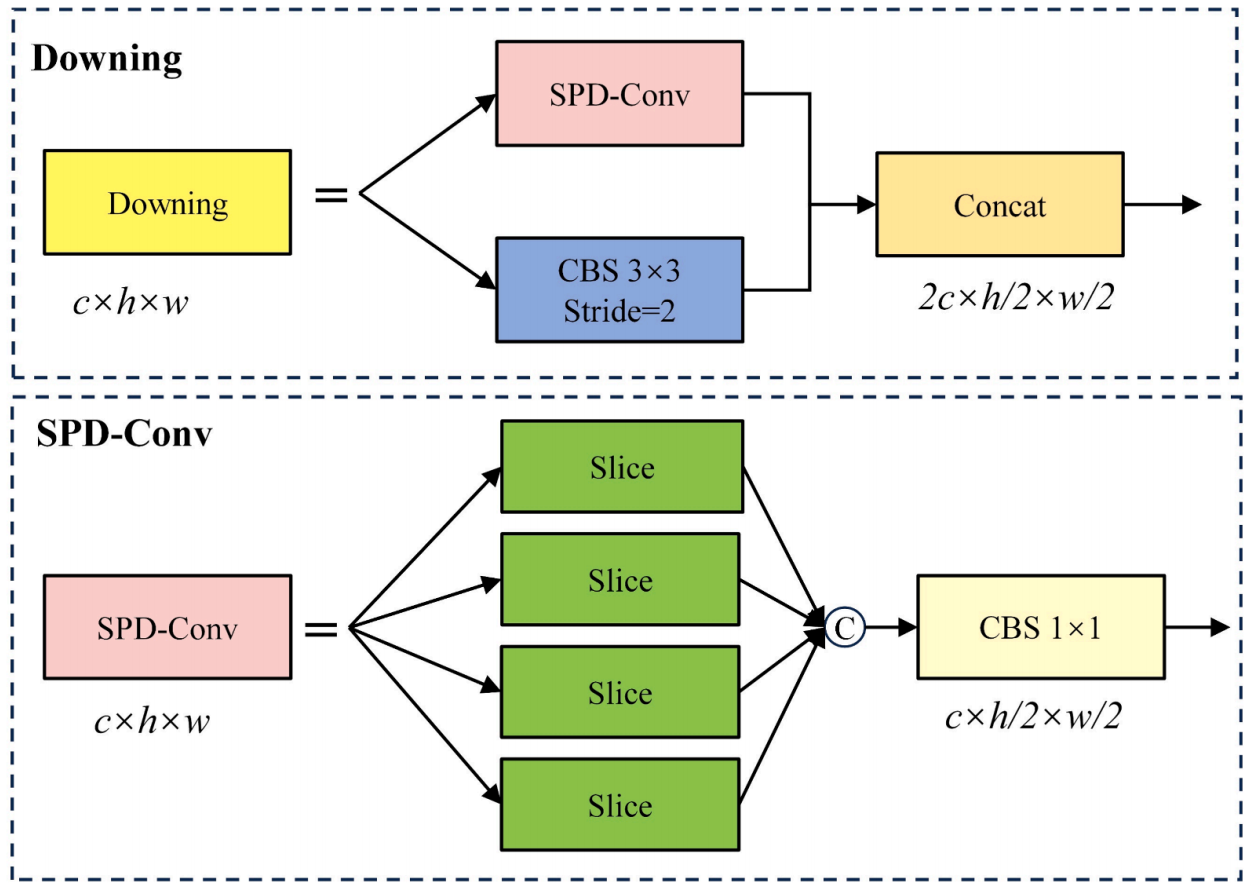 图6 Downing模块结构。
图6 Downing模块结构。
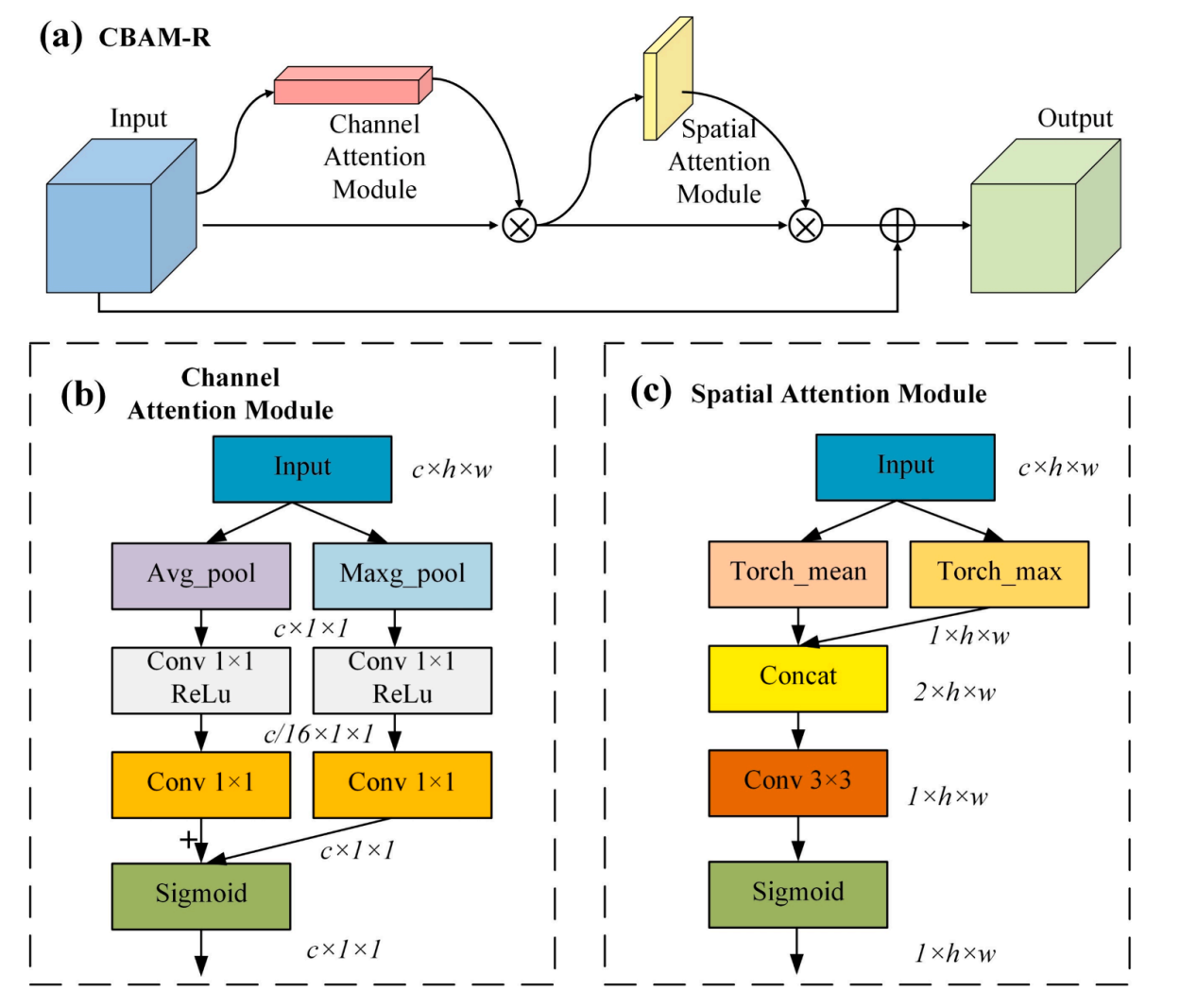 图7 CBAM-R模块结构。
图7 CBAM-R模块结构。
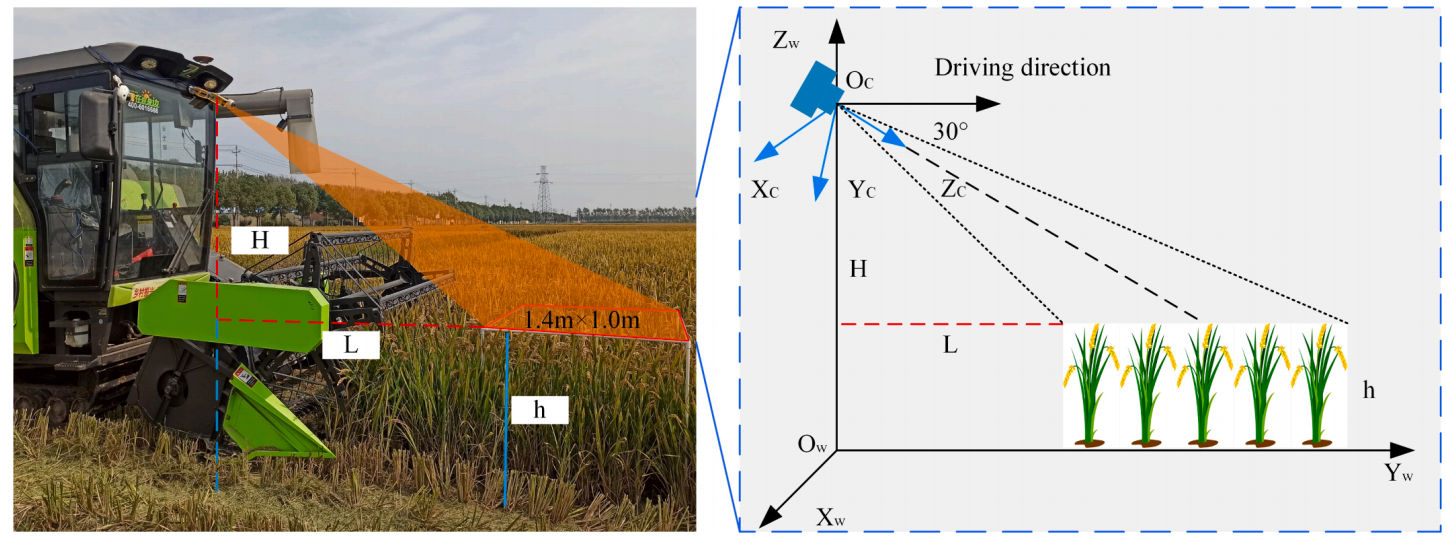 图8 采收作业地点及空间坐标位置设置。
图8 采收作业地点及空间坐标位置设置。
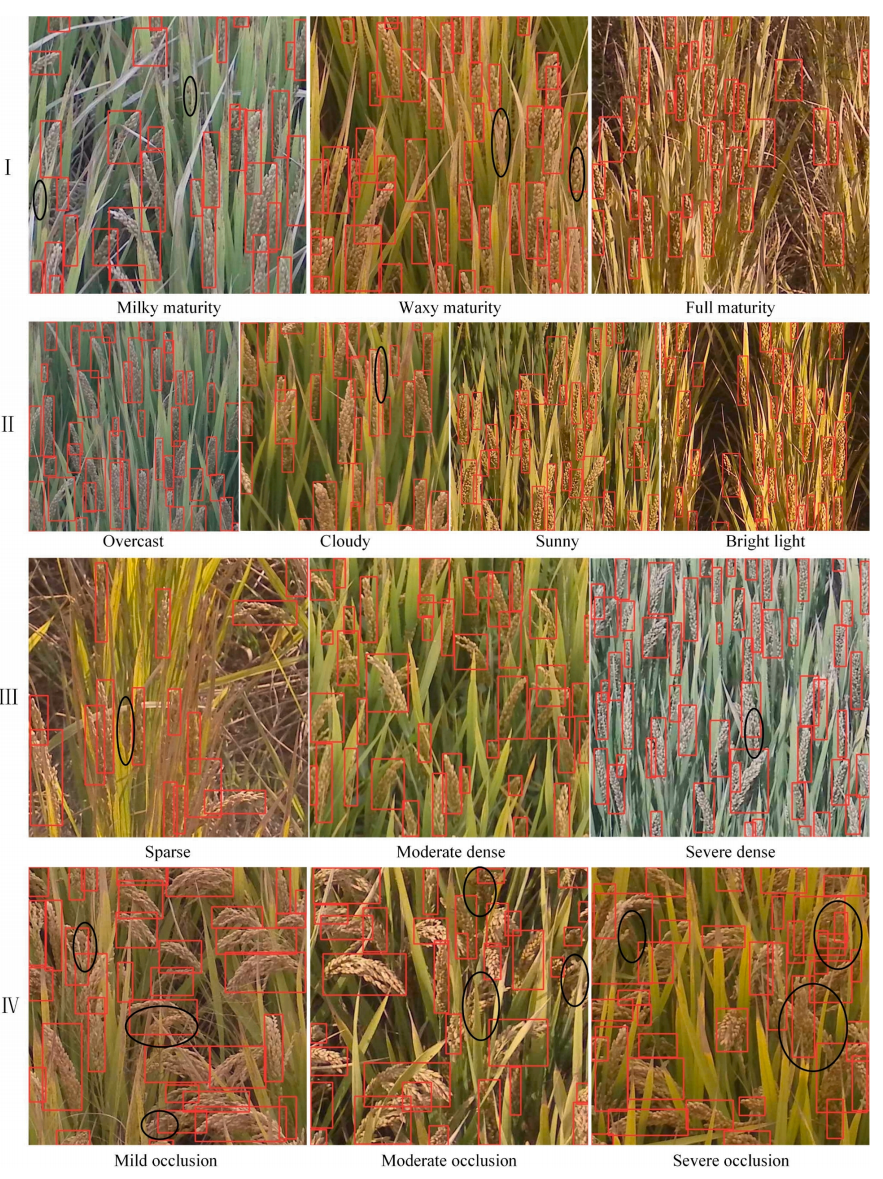 图9 RP-YOLO的穗部检测结果。
图9 RP-YOLO的穗部检测结果。
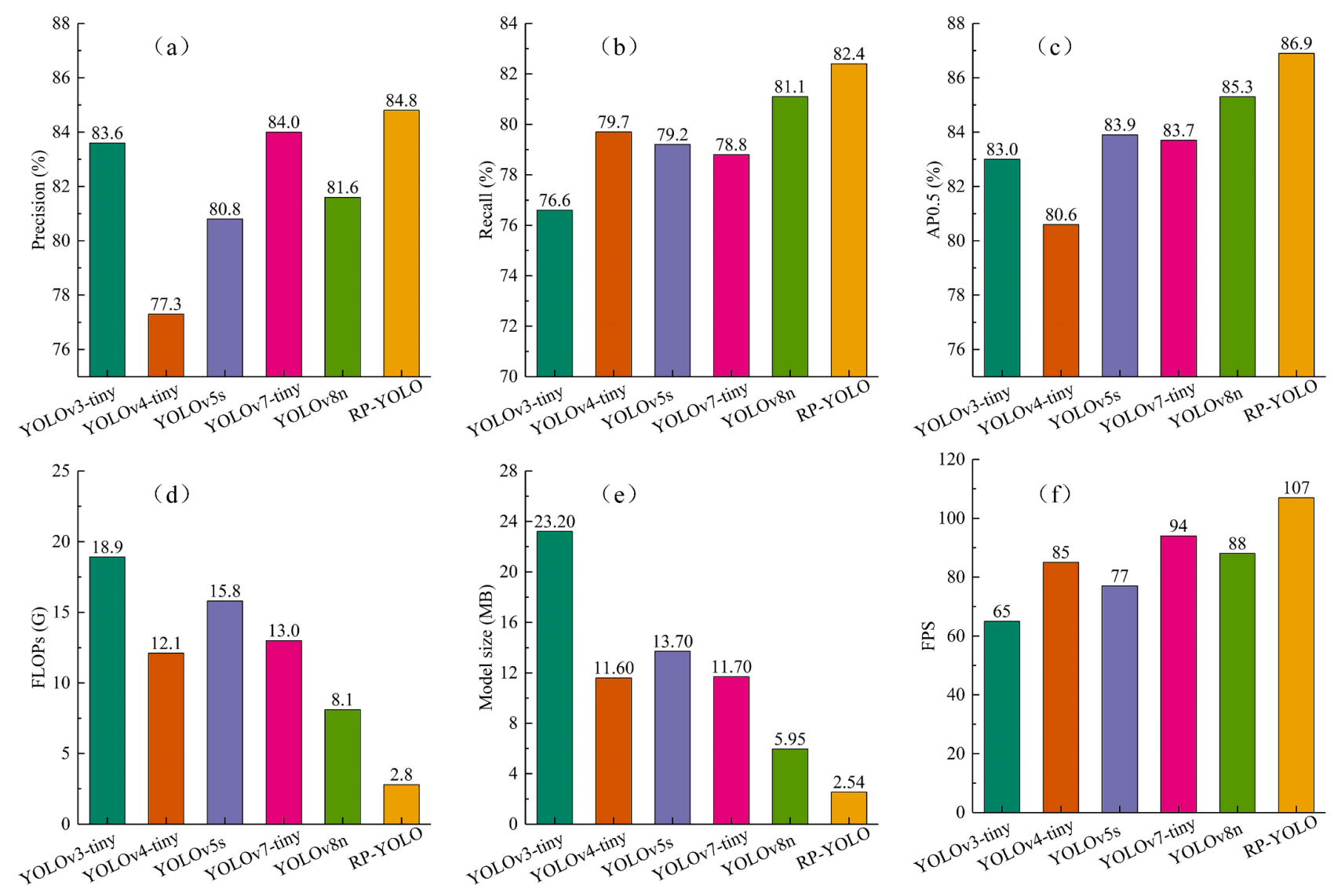 图10 RP-YOLO与轻量级YOLO模型的比较:(a) Precision; (b) Recall; (c) AP0.5; (d) FLOPs; (e) Model size; (f) FPS.
图10 RP-YOLO与轻量级YOLO模型的比较:(a) Precision; (b) Recall; (c) AP0.5; (d) FLOPs; (e) Model size; (f) FPS.
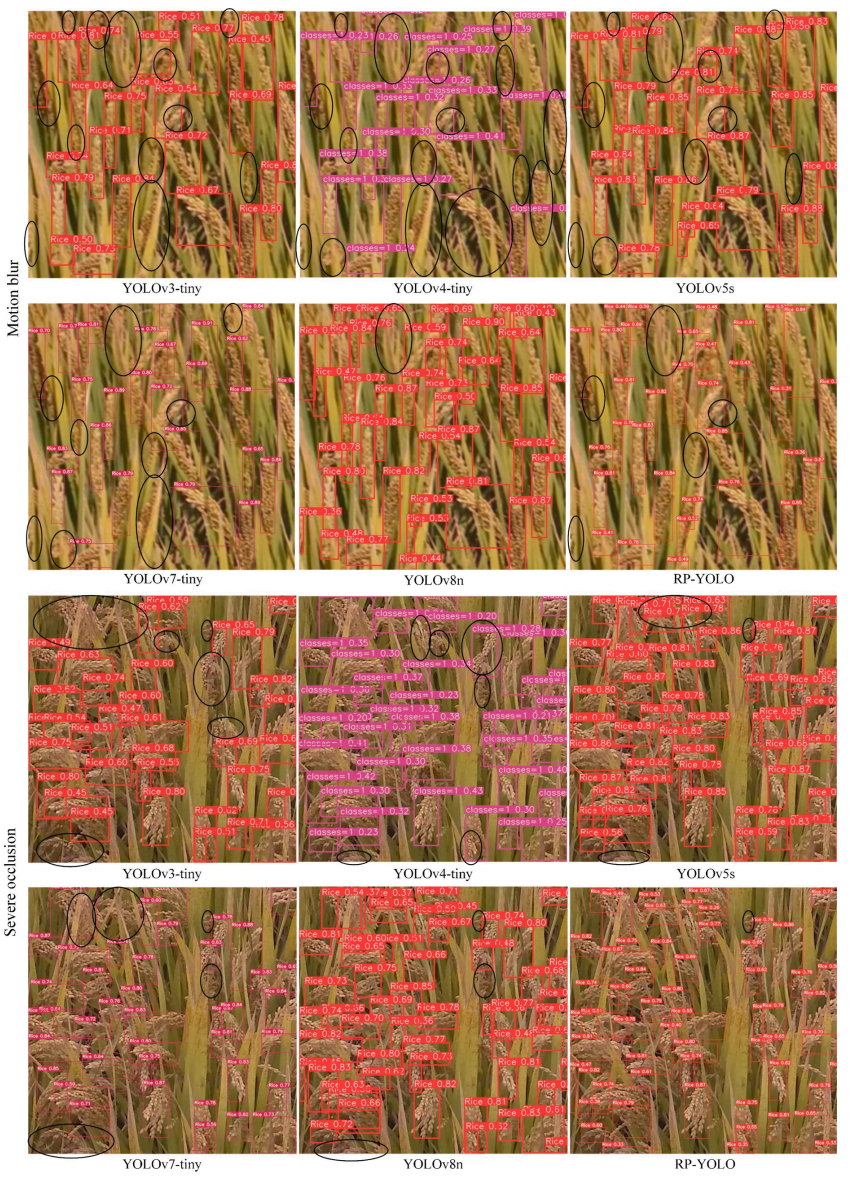
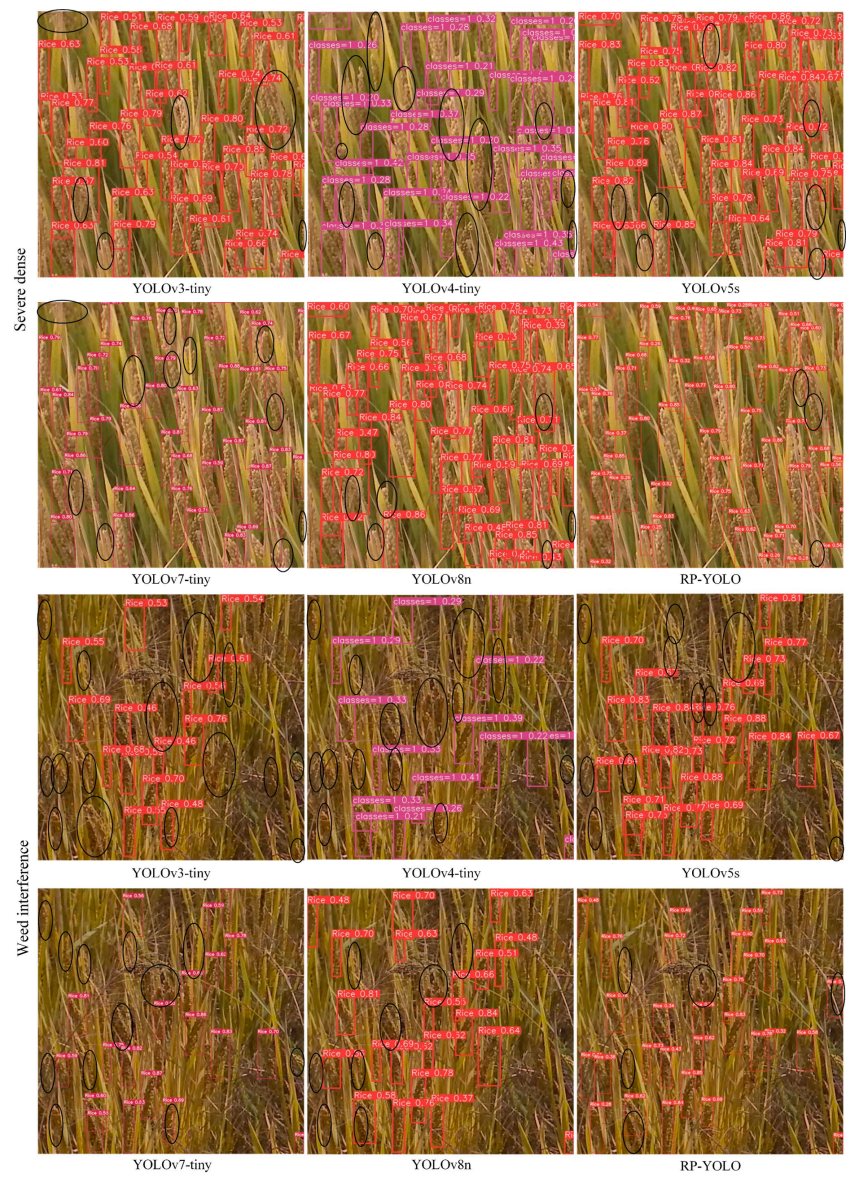 图11 RP-YOLO与轻量级YOLO检测水稻穗部的比较。
图11 RP-YOLO与轻量级YOLO检测水稻穗部的比较。
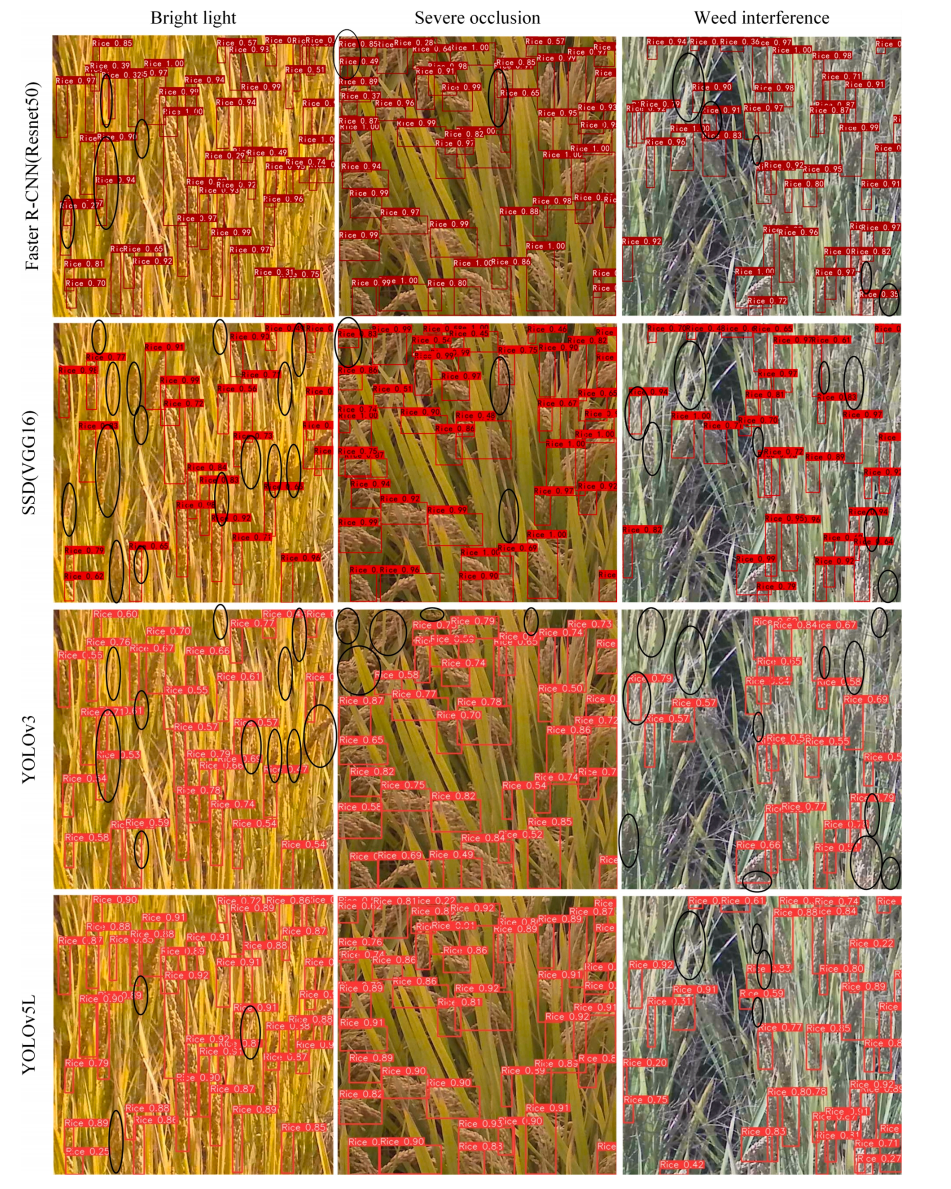
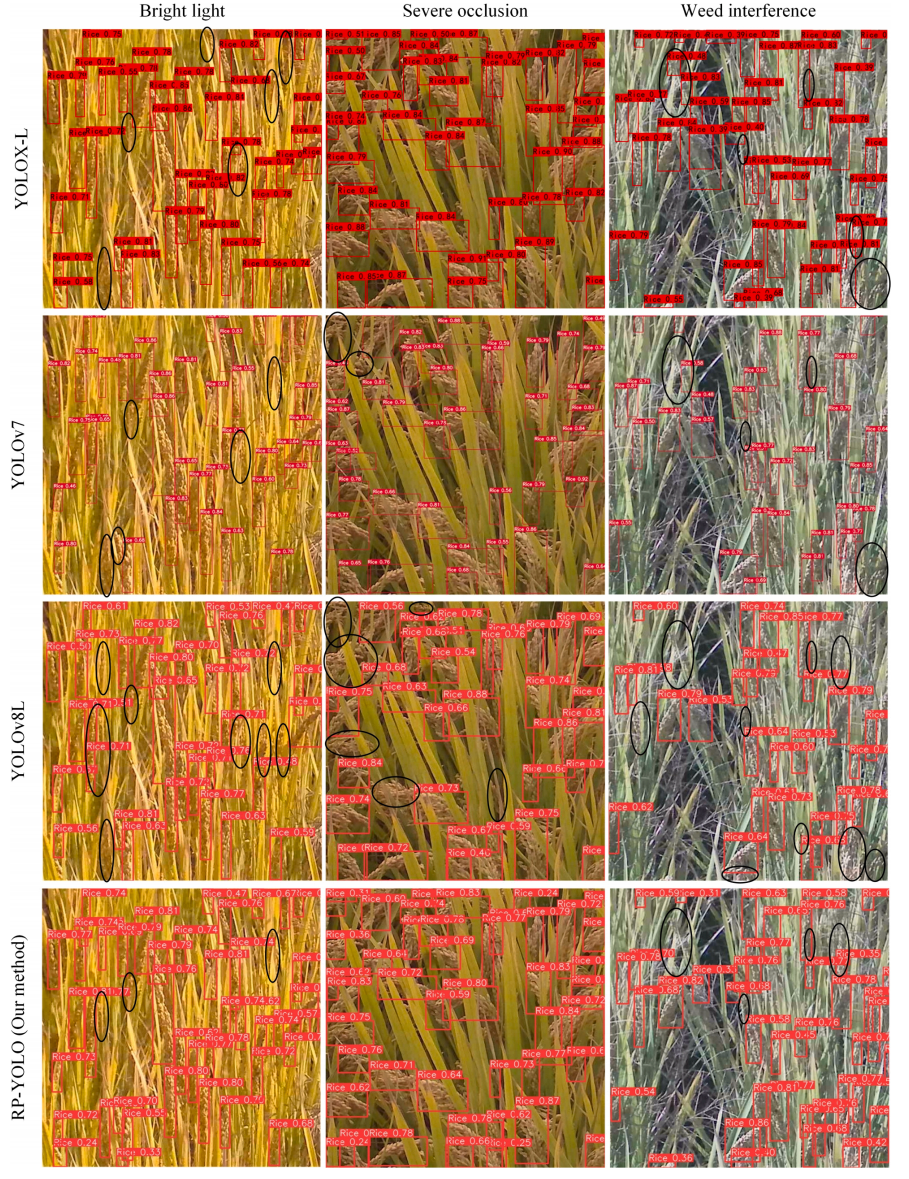 图12 RP-YOLO与常规模型(非轻量化)水稻穗部检测的比较。
图12 RP-YOLO与常规模型(非轻量化)水稻穗部检测的比较。
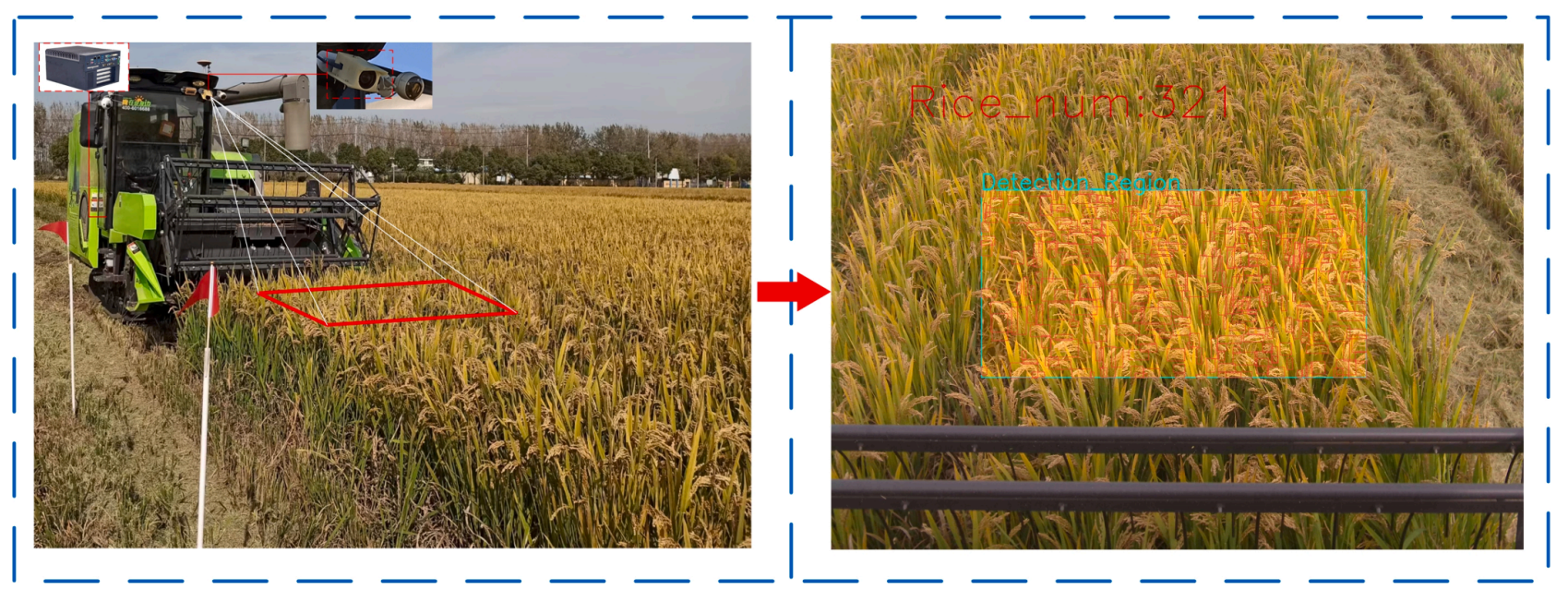 图13 水稻穗密度检测的田间应用。
图13 水稻穗密度检测的田间应用。
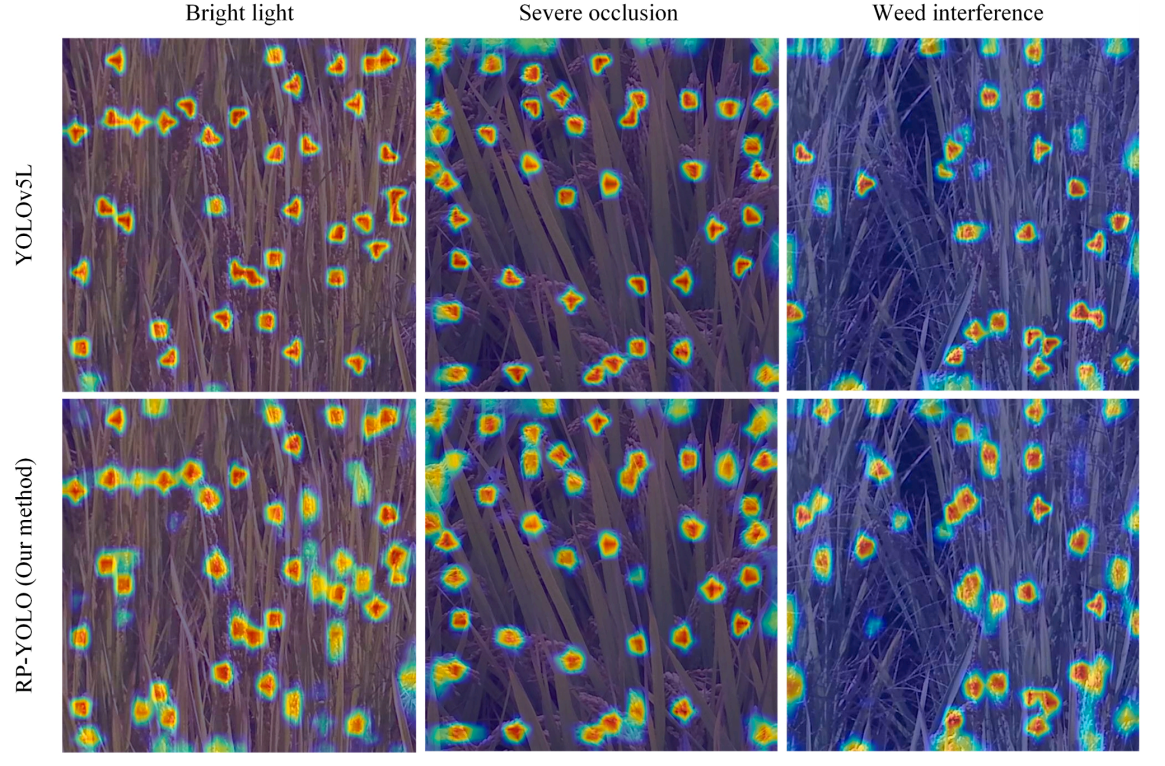 图14 YOLOv5L和RP-YOLO水稻穗部特征热图。
图14 YOLOv5L和RP-YOLO水稻穗部特征热图。
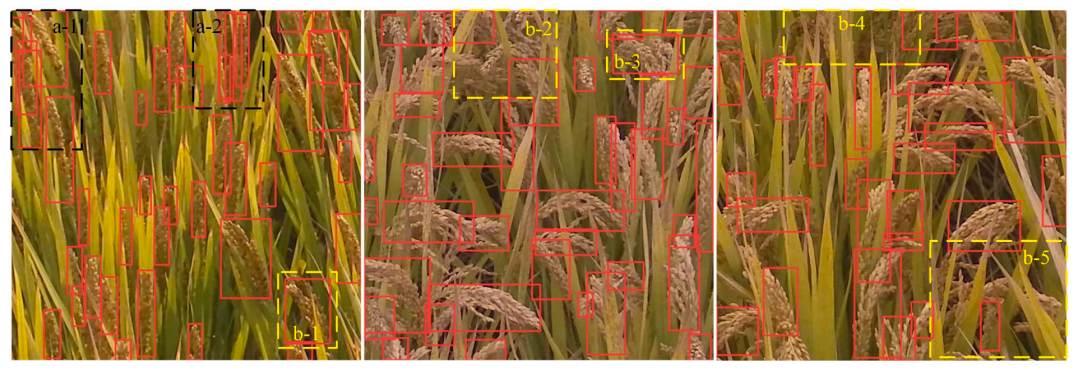 图15 RP-YOLO的错误和漏检。注:a-1、a-2为误检,b-1、b-2、b-3、b-4、b-5为漏检。
图15 RP-YOLO的错误和漏检。注:a-1、a-2为误检,b-1、b-2、b-3、b-4、b-5为漏检。
Sun, J., Zhou, J., He, Y., Jia, H., & Toroitich Rottok, L. (2024). Detection of rice panicle density for unmanned harvesters via RP-YOLO. Computers and Electronics in Agriculture. 226, 109371.
编辑
王春颖
推荐新闻

视频展示
联系我们
慧诺瑞德(北京)科技有限公司
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯