学术中心
《精准农业中的无人机系统》:数字农业中无人驾驶飞机系统的数据采集
发布时间:
2022-06-19
来源:
本站
作者:
PhenoTrait
Springer出版社推出的智慧农业系列丛书介绍了智慧农业技术的进展,包括但不限于作物收获机器人、大田作物无人机技术、植物工厂中的创新物联网应用以及优化生产过程的大数据。它包括理论研究和实际应用,重点是系统研究。将强调农业生产中的人工智能技术,包括创新算法和新的应用领域。此外,新的作物正在出现,如美国的大麻,也有覆盖。这一系列书籍将覆盖世界各地,如美国、加拿大、中国、日本、韩国和巴西。
智慧农业系列丛书旨在为跨学科研究人员提供一个学术平台,提供与智慧农业相关的最新技术。鼓励不同学术背景的研究人员为本书做出贡献,例如农业工程师、育种者、园艺家、农学家和植物病理学家。这套书的目标读者非常广泛—所有与农业生产有关的专业人员。它也可以作为研究生的教科书。
由Zhao ZHANG, Hu LIU, Ce YANG, Yiannis AMPATZIDIS, Jianfeng ZHOU和Yu JIANG编著的《Unmanned Aerial Systems in Precision Agriculture》(《精准农业中的无人机系统》)刚出版不久。全书共8章,描述了无人机(UAV)在精准农业中的技术进步和应用。它专注于无人机在农业中的应用,如作物病害检测,季中产量估计,作物养分状况和高通量表型。与专注于特定应用的个别论文不同,本书为具有广泛主题的读者提供了一个整体的观点。除了植物科学,植物病理学,育种,工程领域的研究人员外,它还面向对成像处理,农业人工智能,精准农业,农业自动化和机器人技术感兴趣的本科生和研究生。植物表型资讯组织专业编辑人员做了系统介绍,将分8期推出。
近年来,无人机系统(UAS)在农业中得到广泛应用。虽然已经开发并正在开发许多商业和开源解决方案,但在定制数据采集系统所做的工作有限,这对于解决当前农业UAS系统中的主要技术问题至关重要。本章旨在提供一个基于机器人操作系统(ROS)的概念框架,用于设计和开发农业无人机系统的自定义数据采集(DAQ)系统。提供了设计概念和主要实施细节,以促进未来的发展。本章给出了一个案例研究,以演示如何使用概念框架为商用无人机设计和实现基于ROS的数据采集系统。案例研究还证明了所开发的图像采集系统在大麻育种实验中的成功,以及使用UAS传感系统对大麻进行高通量表型分析的价值。因此,所提出的概念框架可以作为今后开发定制DAQ系统的参考。
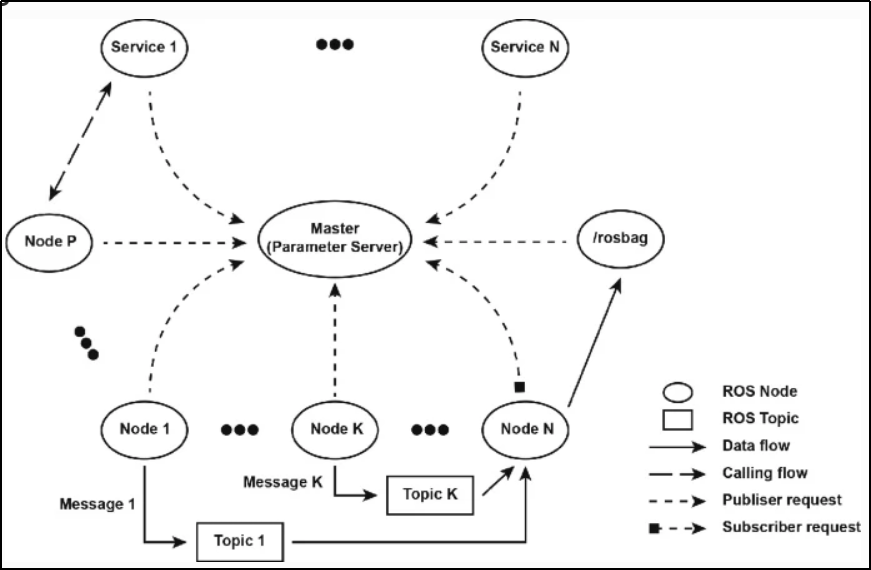
图1 ROS计算图中的关键ROS组件及其潜在连接图。应该注意的是,节点和服务都是过程,但使用不同的通信方案。ROS Master是一个命名和注册服务,允许其他节点和服务相互识别,参数服务器是ROS Master的一部分。Rosbag是默认的ROS包,用于保存和检索ROS Bag格式的信息(如原始数据、时间戳等)。
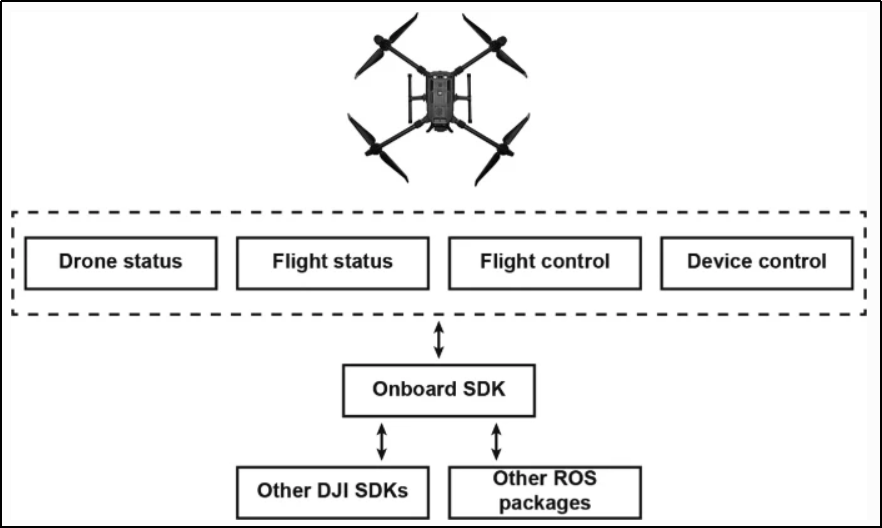
图2 大疆的机载SDK(OSDK)以及与其他SDK和ROS软件包的接口图。虚线矩形中的功能是DJI OSDK中的高级ROS节点,用于无人机信息采集、飞行状态检查、飞行和有效载荷控制。其他大疆的SDK包括用于嵌入式系统(如安卓和苹果iOS)的移动SDK和用于大疆认证的配件和传感器(如云台和相机)的有效载荷SDK。大疆提供了一个建立在ROS基础上的OSDK版本,自然支持所有ROS软件包的开发。
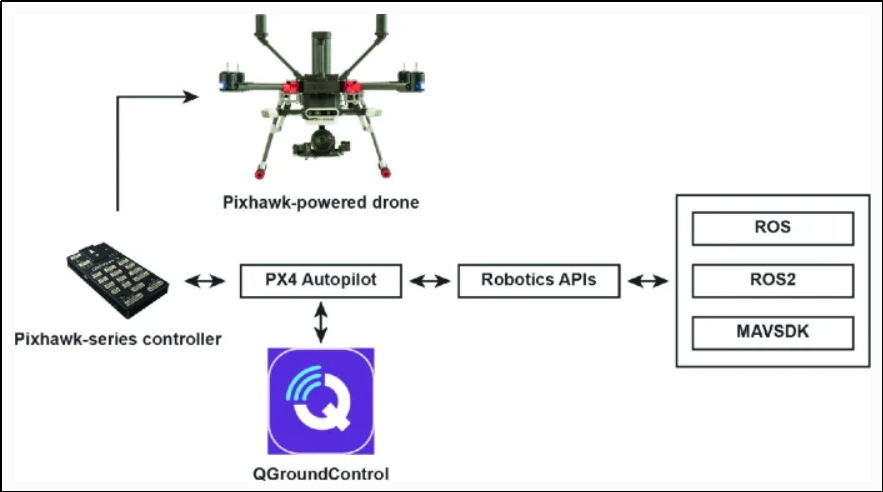
图3 PX4自动驾驶仪生态系统示意图,包括PX4、Pixhawk-系列硬件控制器和QGroundControl地面站。PX4是一组用于无人机、地面和海上车辆的自动驾驶仪控制功能(即软件)。PX4提供机器人应用程序编程接口(API),以便于为领域应用开发任何PX4驱动的机器人,而无需考虑所有设计细节。与DJI生态系统相比,PX4 Autopilot生态系统支持更多的机器人中间件,如ROS、ROS2和MAVSDK。
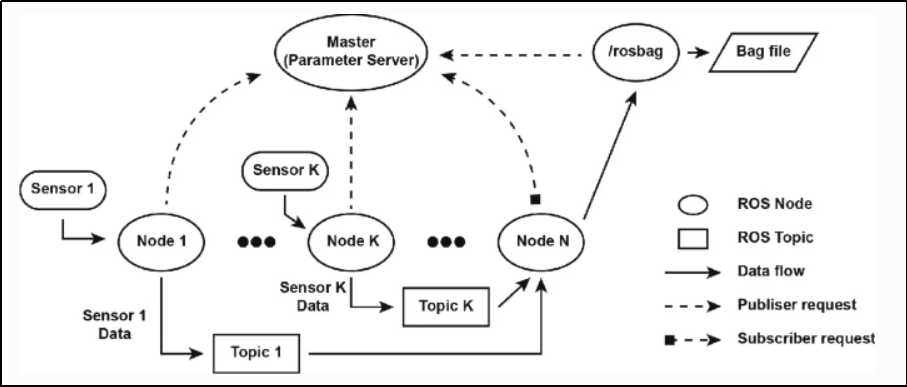
图4带有传感器节点的基于ROS的数据采集系统示意图。每个传感器节点控制一个传感器进行初始化、数据流和错误处理。通常情况下,需要开发一个单独的节点来订阅所有的传感器节点,以便一起收集信息,并使用rosbag包进行数据序列化。
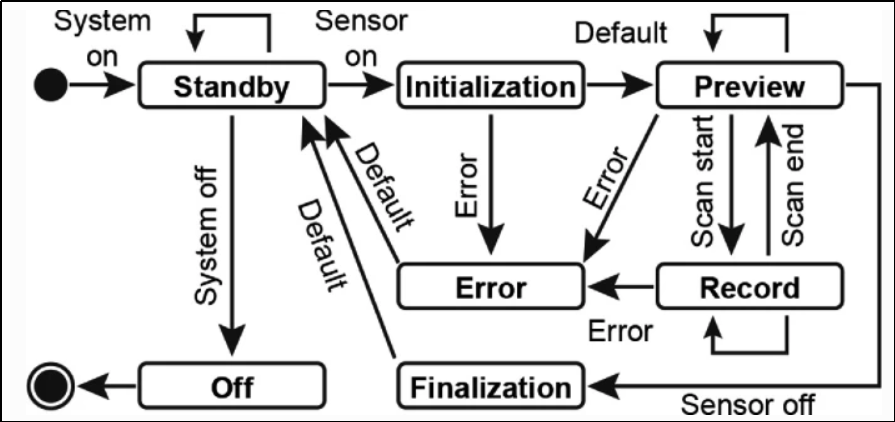
图5为传感器节点和服务开发的有限状态机(FSM)的概念,将在基于ROS的数据采集系统中使用。应该注意的是,由于传感器节点和服务的通信方案不同,它们的实现也会不同。由于单向通信,传感器节点需要自动化整个状态机,而传感器服务可以被设计成提供交互式响应,以最大限度地提高人类操作员的参与度,特别是错误处理。
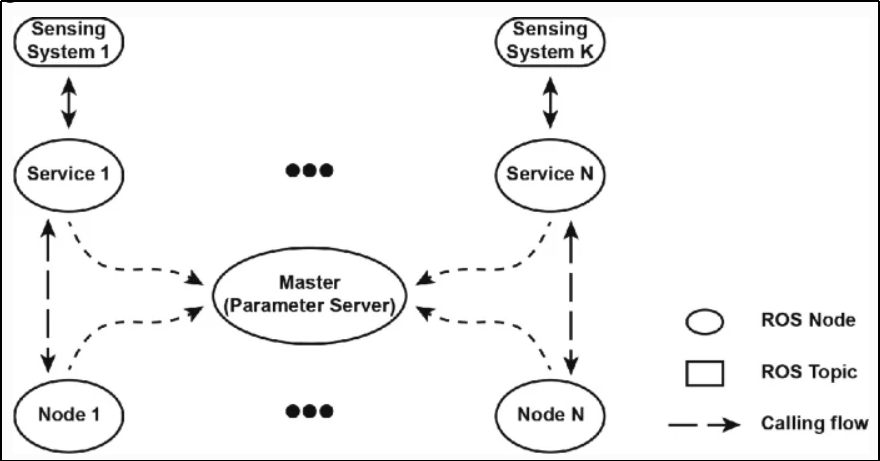
图6带有传感器服务的基于ROS的数据采集系统示意图。每个传感器服务通过提供的传感器控制API与单个传感器进行通信。需要开发一个相应的客户端传感器节点来调用服务,以实现RPC式的传感器控制和数据采集。由于没有数据被流回基于ROS的数据采集系统,原始数据将以传感器制造商在机载设备中预定的格式保存。另外,通过相同的ROS环境进行数据可视化是不可行的,可能需要仔细考虑I/O带宽的问题。
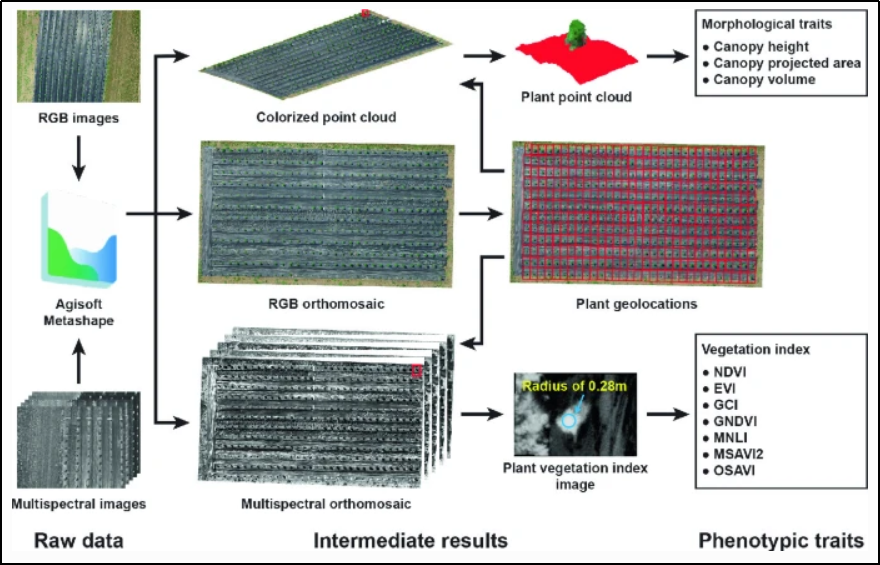
图7用于从RGB和多光谱数据中提取表型特征的数据处理流程。衍生的植被指数包括归一化差异植被指数(NDVI)、增强植被指数(EVI)、绿色叶绿素指数(GCI)、绿色归一化差异植被指数(GNDVI)、修正非线性指数(MNLI)、修正土壤调整植被指数2(MSAVI2)以及优化土壤调整植被指数(OSAVI)。
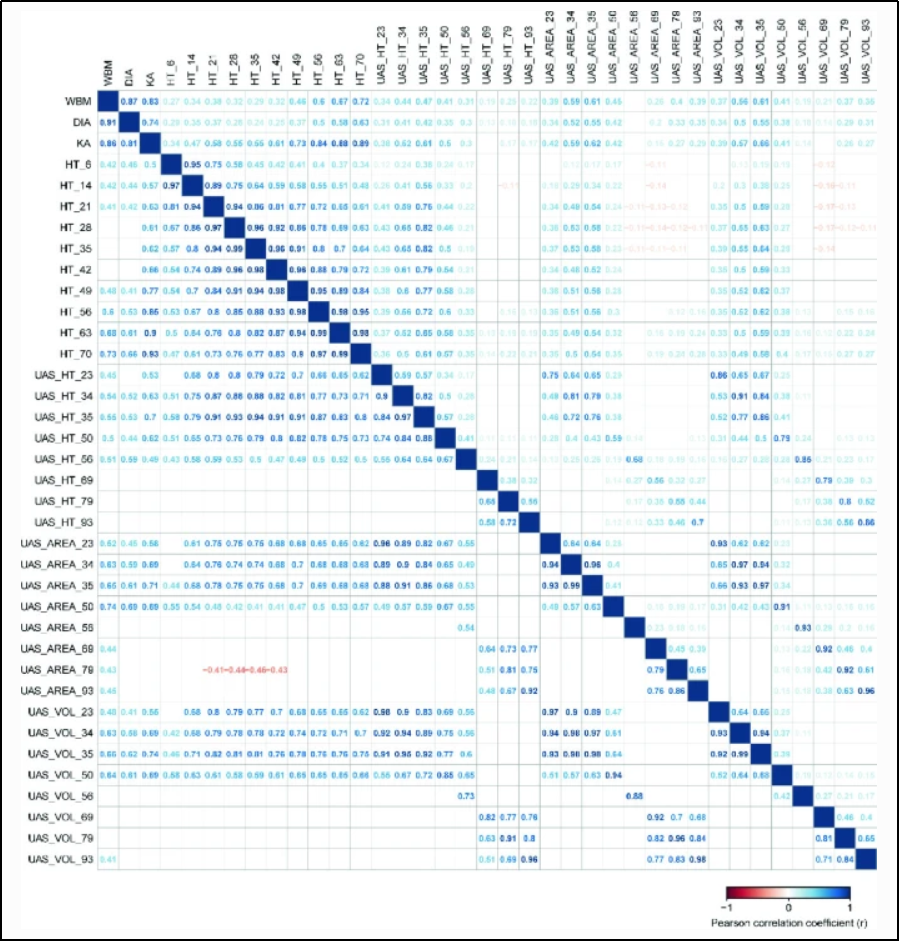
图8田间采集性状与地表形态指数的相关性。WBM, DIA, KA, HT, AREA, VOL分别表示总湿生物量、茎基部直径、分枝夹角、株高、植物冠层面积和植物冠层体积。
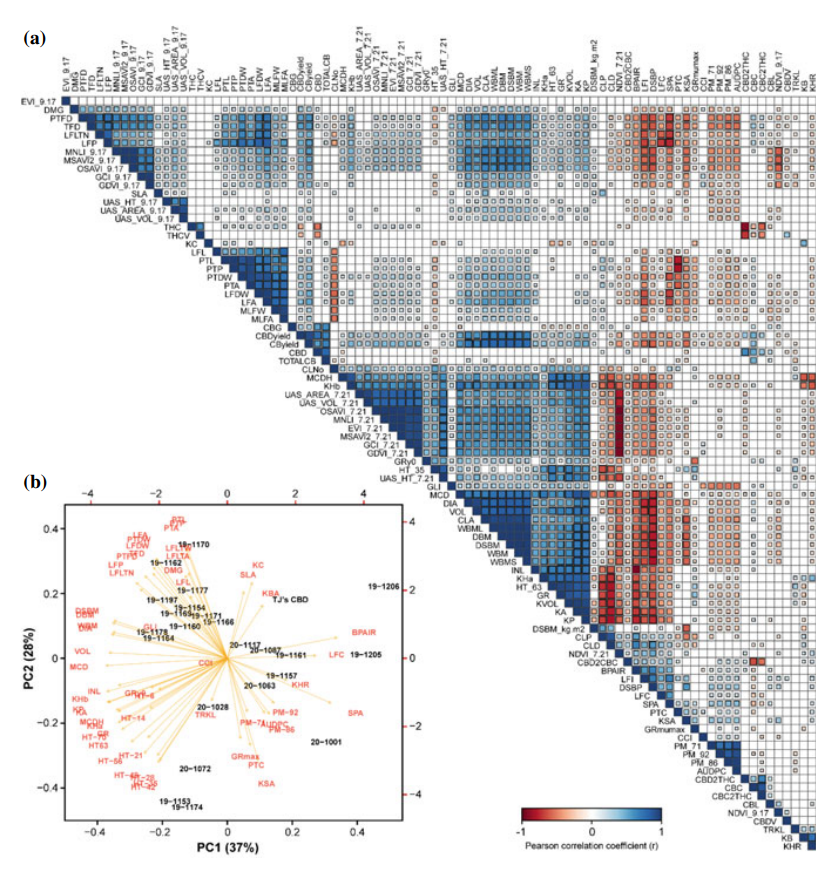
图9 田间收集形状的相关性。(a)中每个方块的颜色表示显著(p<0.01)正(蓝色)或负(红色)相关性。(b)使用家族平均值的相同性状(按比例)的PCA双曲线图。
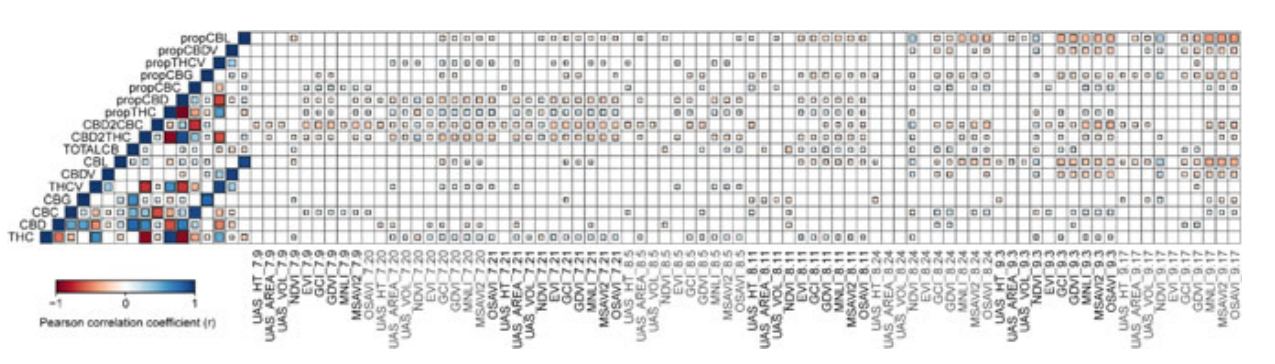
图10大麻素剖面图和空中指数随时间变化的成对相关性。
来源:Zhang, Z, Liu, H, Yang, C, et al. Unmanned Aerial Systems in Precision Agriculture [M]. Springer, Singapore, 2022.
https://doi.org/10.1007/978-981-19-2027-1_4
编辑:小王博士在努力
推荐新闻

视频展示
联系我们
慧诺瑞德(北京)科技有限公司
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯