学术中心
田间无人机协同操作系统
发布时间:
2021-05-26
来源:
本站
作者:
PhenoTrait
基于无人机(UAV)的遥感技术在农业和智能农业领域具有巨大的应用潜力,可以有效地监测植物生长、灌溉过程、病害检测等。大多数基于遥感的田间表型研究是通过在集成RGB相机或多光谱相机的典型无人机完成的。由于风干扰对无人机单相机图像点云生成处理的影响,作物育种和农业生产的精确田间表型测量需要多台摄像机同时采集图像,这些图像相距足够远,可以提供结构和运动计算。为了使无人机和植物在飞行任务中的运动引起的测量误差最小化,本文改进数字表面模型,提出了一种多无人机协同操作系统,实现了从不同角度同时采集图像。
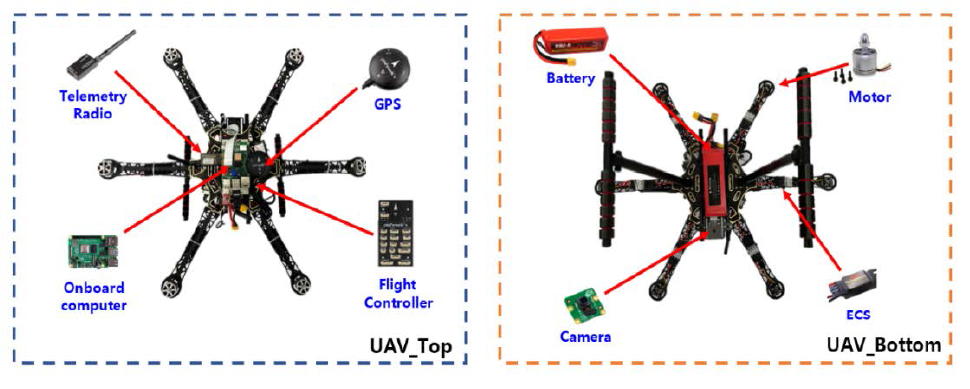 开发的无人机结构
开发的无人机结构
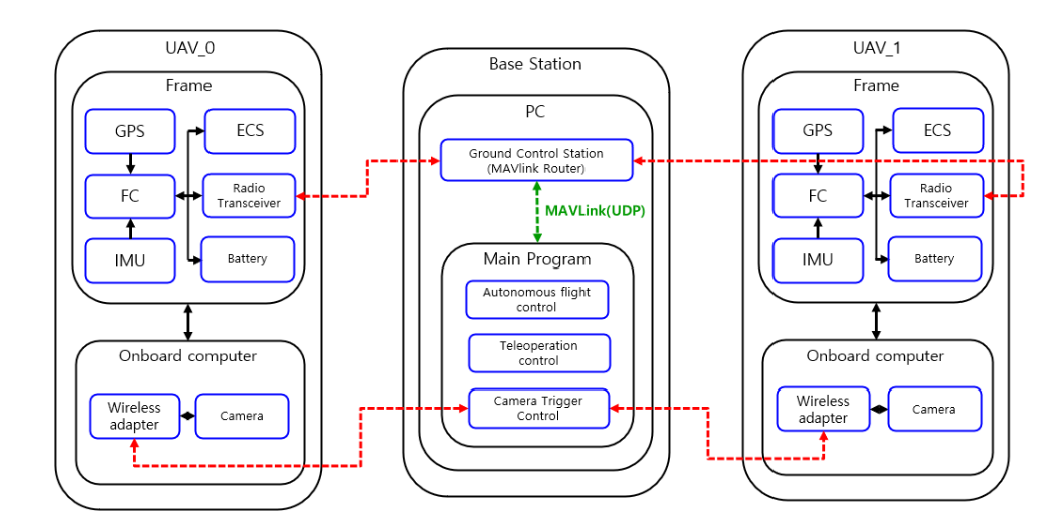
无人机系统配置
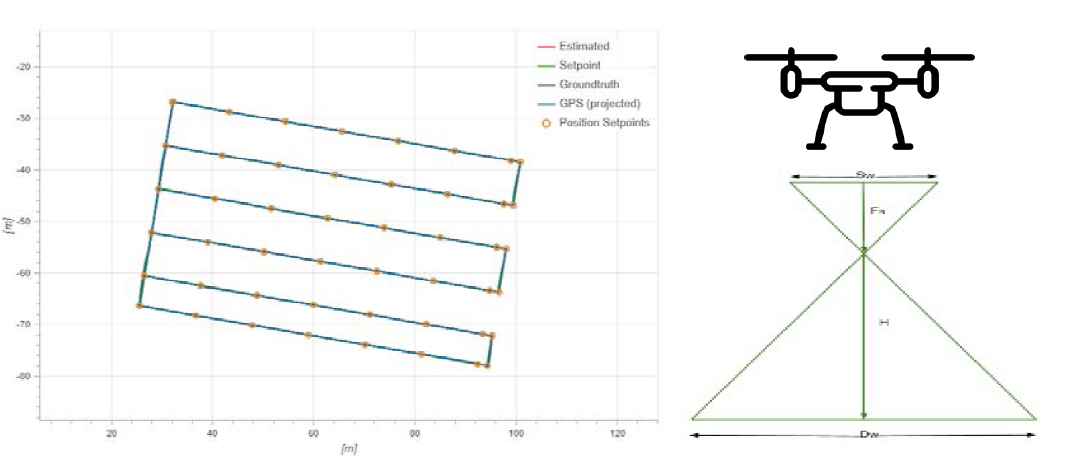
路径生成结果
首先,构建了基于机器人操作系统的协同导航系统,计算控制指令,实现无人机姿态控制和位置稳定。接着,基于通过无线网络系统的主跟随器编队控制算法,跟随式无人机与领航无人机进行协调,以保持所需的恒定速度、方向和图像重叠百分比在同步运动中,最终实现任务的短期完成。最后,为了验证该方法的有效性,在仿真和现场试验中比较了同步多无人机图像采集与单无人机图像采集的野外表型测量误差。
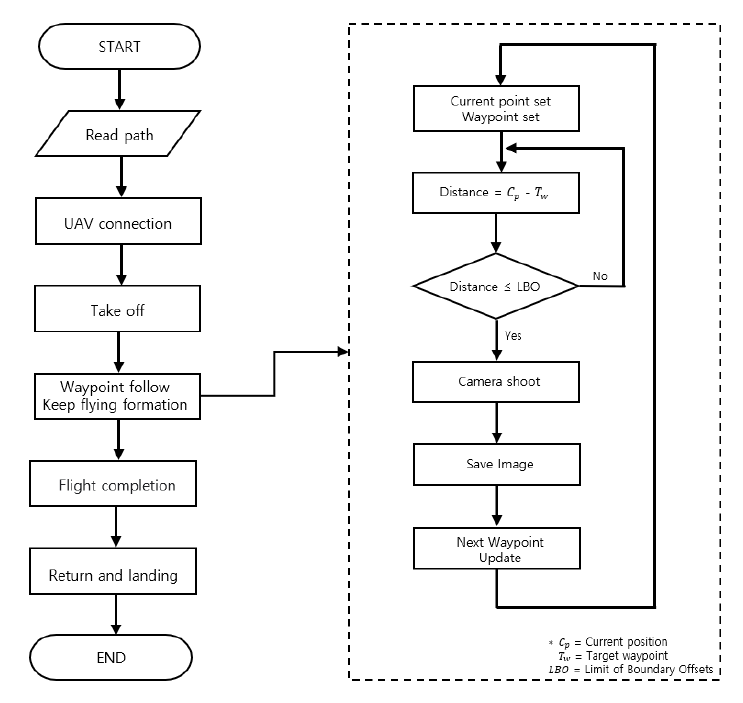
协同驱动算法流程图

等待无人机飞行延迟
来源:
Lee H, Shin B, Thomasson J, et al. A collaborative operation system of autonomous unmanned aerial vehicles for field phenotyping in farm fields. Proceedings Volume 11747, Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping VI; 117470E (2021) https://doi.org/10.1117/12.2585866.
推荐新闻

视频展示
联系我们
慧诺瑞德(北京)科技有限公司
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯